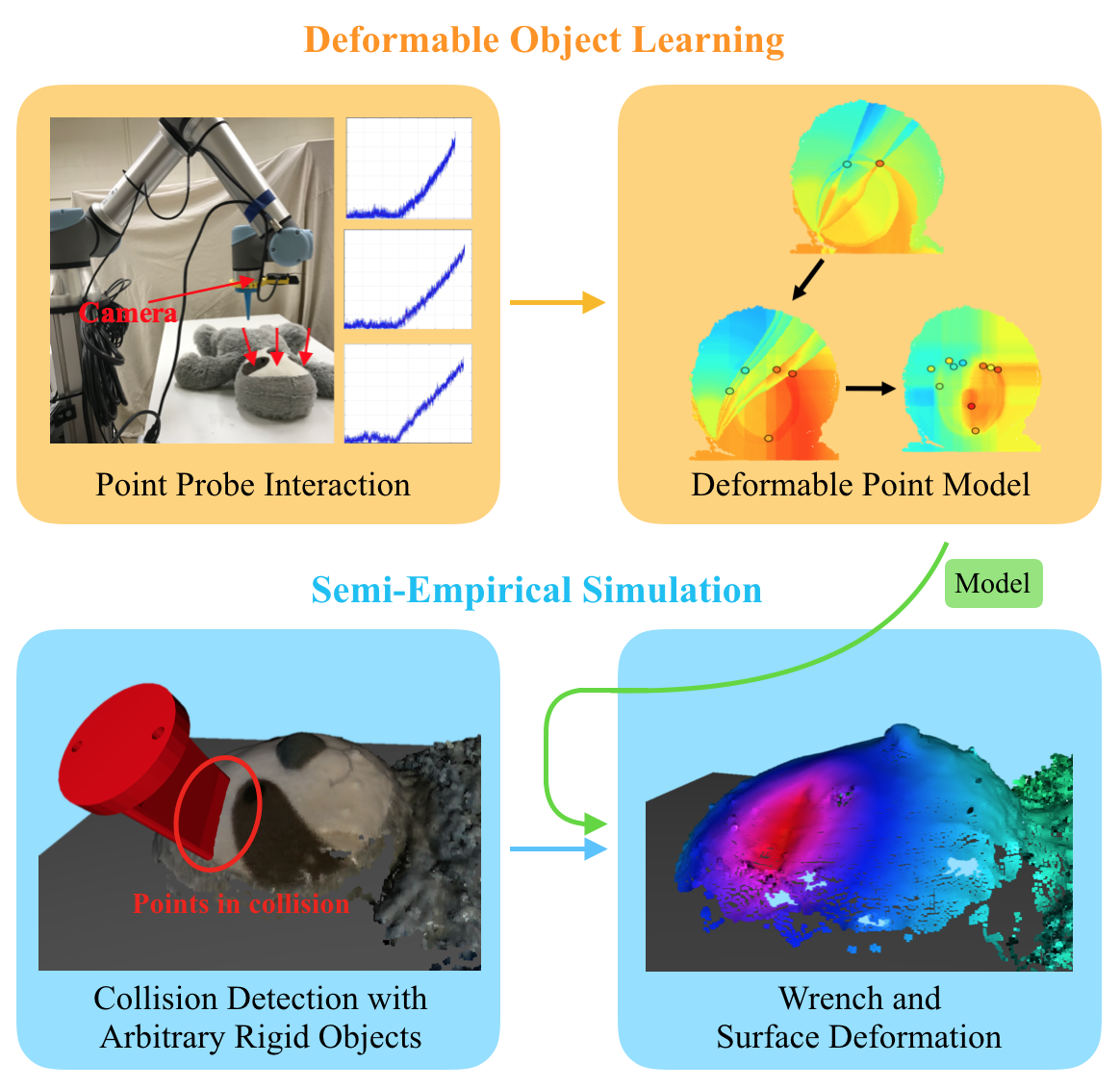
Semi-Empirical Simulation of Learned Force ResponseModels for Heterogeneous Elastic Objects
Published in ICRA, 2020
Recommended citation: Y. Zhu, K. Lu, and K. Hauser, “Semi-Empirical Simulation of Learned Force ResponseModels for Heterogeneous Elastic Objects,” IEEE International Conference on Roboticsand Automation (ICRA) 2020. http://yifanzhu95.github.io/files/Zhu_Poke_2020.pdf
In this work, a semi-empirical visuo-tactile model is proposed for heterogeneous elastic objects, which enables fast simulation.