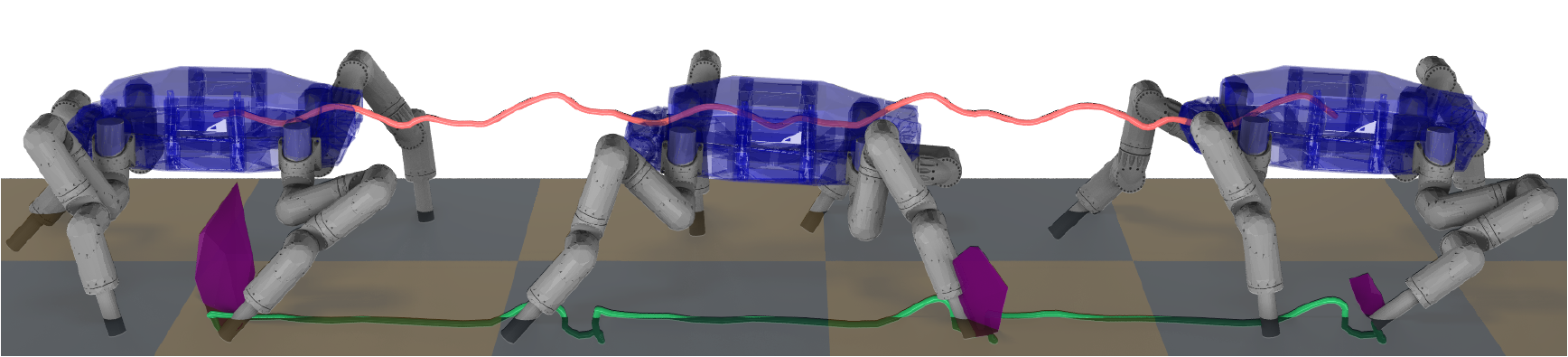
Contact-Implicit Trajectory Optimization With Learned Deformable Contacts Using Bilevel Optimization
Published in ICRA, 2021
Recommended citation: Y. Zhu, Z. Pan, and K. Hauser, “Contact-Implicit Trajectory Optimization With Learned Deformable Contacts Using Bilevel Optimization,” IEEE International Conference on Robotics and Automation (ICRA) 2021. http://yifanzhu95.github.io/files/Zhu_TO_2021.pdf