About me
I am an assistant professor at the Computer Science department at the University of Illinois Chicago, and the director of the Adaptive Robotics Lab. Previously, I was a postdoctoral research scholar at Yale and obtained a Ph.D. from the Computer Science department at the University of Illinois at Urbana-Champaign.
My research vision is to develop fundamental technologies that enable robots to understand their contacts with the external world from proactive interactions and perform meaningful tasks. My prior research lies at the intersection of physics modeling, optimization, machine learning, hardware design. I aim to develop representations for robots that facilitate tight integration of physics modeling and machine learning for predictive world modeling from visual-tactile perceptions, especially in the low-data regime.
Prospective students: Please see this page for more information.
News
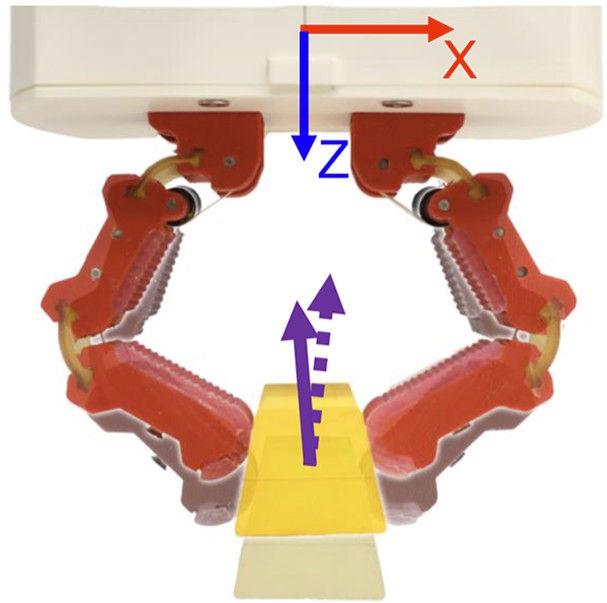
June 2025: Our paper Forces for Free: Vision-Based Contact Force Estimation with a Compliant Hand is published at Science Robotics! ![]()
June 2025: I am starting as an assistant professor at CS@UIC this Fall!
June 2023: I successfully defended on 06/20!
April 2023: Our paper Few-shot Adaptation for Manipulating Granular Materials Under Domain Shift is accepted to RSS 2023! We also release a scooping dataset with over 6,000 scoops on a diverse set of materials: ![]()
![]()
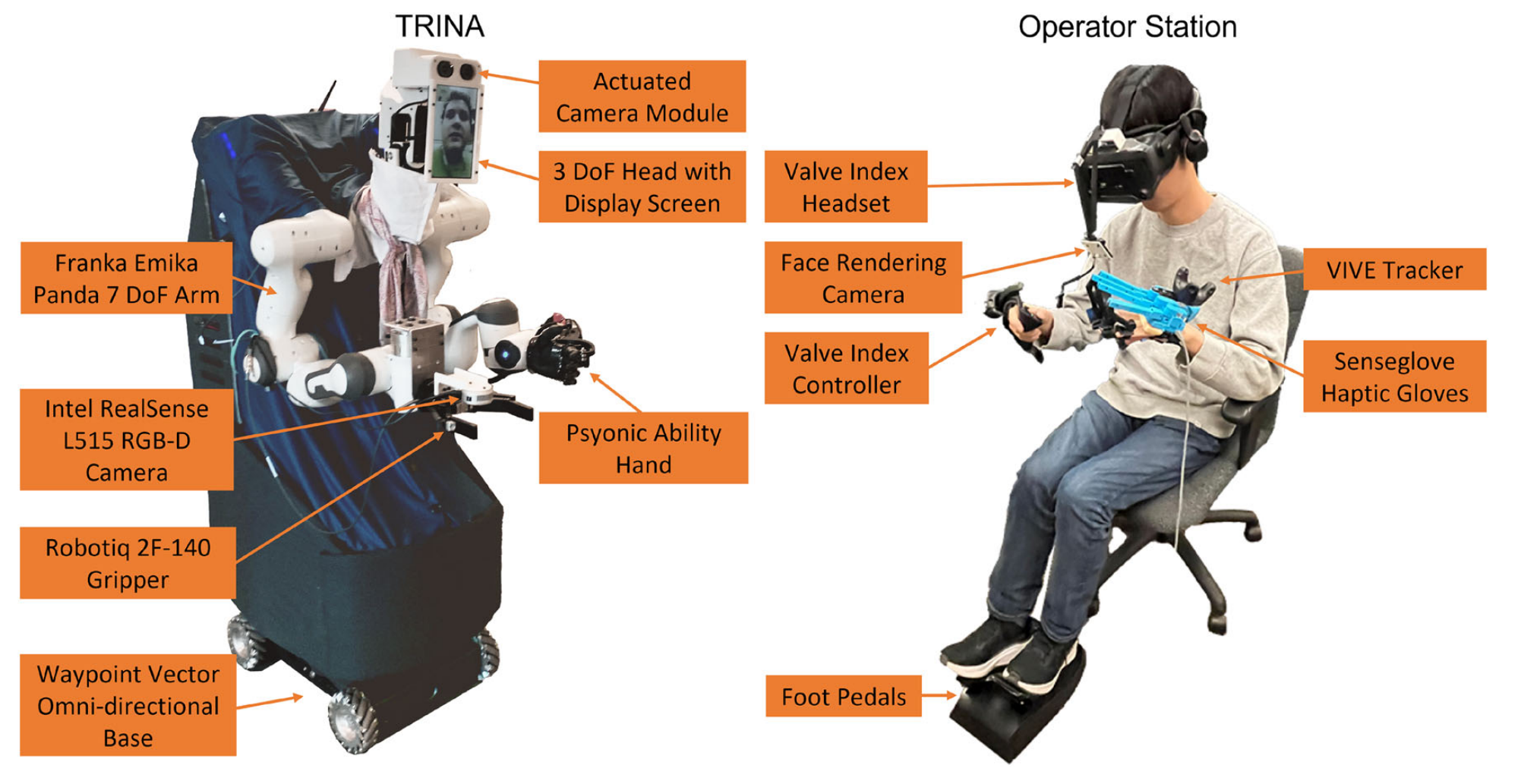
Nov 2022: Our robot TRINA has been participating in the AVATAR XPRIZE competition as Team AVATRINA, and we just scored 4-th in the finals, one of the only 4 teams that completed all 10 tasks: media.
Selected Publications
Robots that I work with
 UR5 UR5 |  TRINA TRINA |  Robosimian Robosimian |  Franka Panda Franka Panda |